


製品名:コラボレーティブロボットアームロボットプロジェクトR&D インテリジェントロボットプロジェクトR&D
このメカニカルアームは、完全にインポートされた炭素繊維材料で作られています。出力フランジのサイズとインターフェイスは、要求に応じて設計できます。フランジは、ATI 6次元力センサーと互換性があります。
主な適用分野:3C、スプレー、研磨、組み立て、教育、トレーニングなど。
ロボットアームの構成:
メカニカルアームは7自由度で設計されており、その構造を図1に示します。

図1マニピュレーターの構造
メカニカルアームメカニカルインターフェース
マニピュレーターのデフォルトの出力フランジを下図に示します。特定のサイズとインターフェースは、要件に応じて設計できます。フランジは、ATI 6次元力センサーと互換性があります。
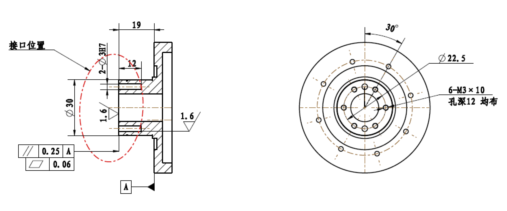
図2マニピュレーターの出力フランジ
ロボットアームの取付ベースは直径200mmの円形フランジで、固定用にM6ねじ穴12個が均等に配置されています。
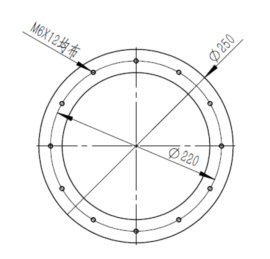
図4取り付けベースのフランジ

カテゴリー | 性能パラメーター | |
更大荷重 | 5キロ | |
指定荷重 | 3キロ | |
翼幅(軸2と軸7の間) | 1300mm | |
自由度 | 7軸 | |
繰り返し精度 | ±0.1mm | |
最後の更高速度 | 500mm / s | |
端末の加速 | 0.5Gより大きい | |
前腕接続出力 | コミュニケーション | 1つのCANチャネル |
電気の | 1 5V電源 | |
共同更高速度 | 10RPM | |
関節回転角度 | 1,3,5軸±180°、2軸±120°、 4、6軸±140°、7軸±360° | |
関節位置決め精度 | 1アーク分 | |
保護クラス | IP54 | |
駆動方式 | ACサーボ(PMSM) | |
制御バス | EtherCAT | |
位置フィードバック | 絶対エンコーダ | |
インストール方法 | 床置き/上置き | |
作業環境 | 使用温度 | ﹢ 0℃から﹢ 50℃ |
湿度要件 | 30%〜90%結露しない、換気された屋内環境 | |
振動 | 0.5G未満のストレッチ状態 | |
その他の | 引火性および腐食性の液体/ガスから遠ざける | |





